Attitude and heading reference AHRS
- Attitude and heading reference (AHRS) ensures precise positioning, orientation, and velocity.
- Operates as an inertial unit for navigation in GPS-denied environments for manned and unmanned aircraft.
- Built for medium to large drones, it also integrates as a standard component in the ESIS unit.
- Uses Kalman filtering to process gyro, distance, pitch, and roll data for accurate navigation.
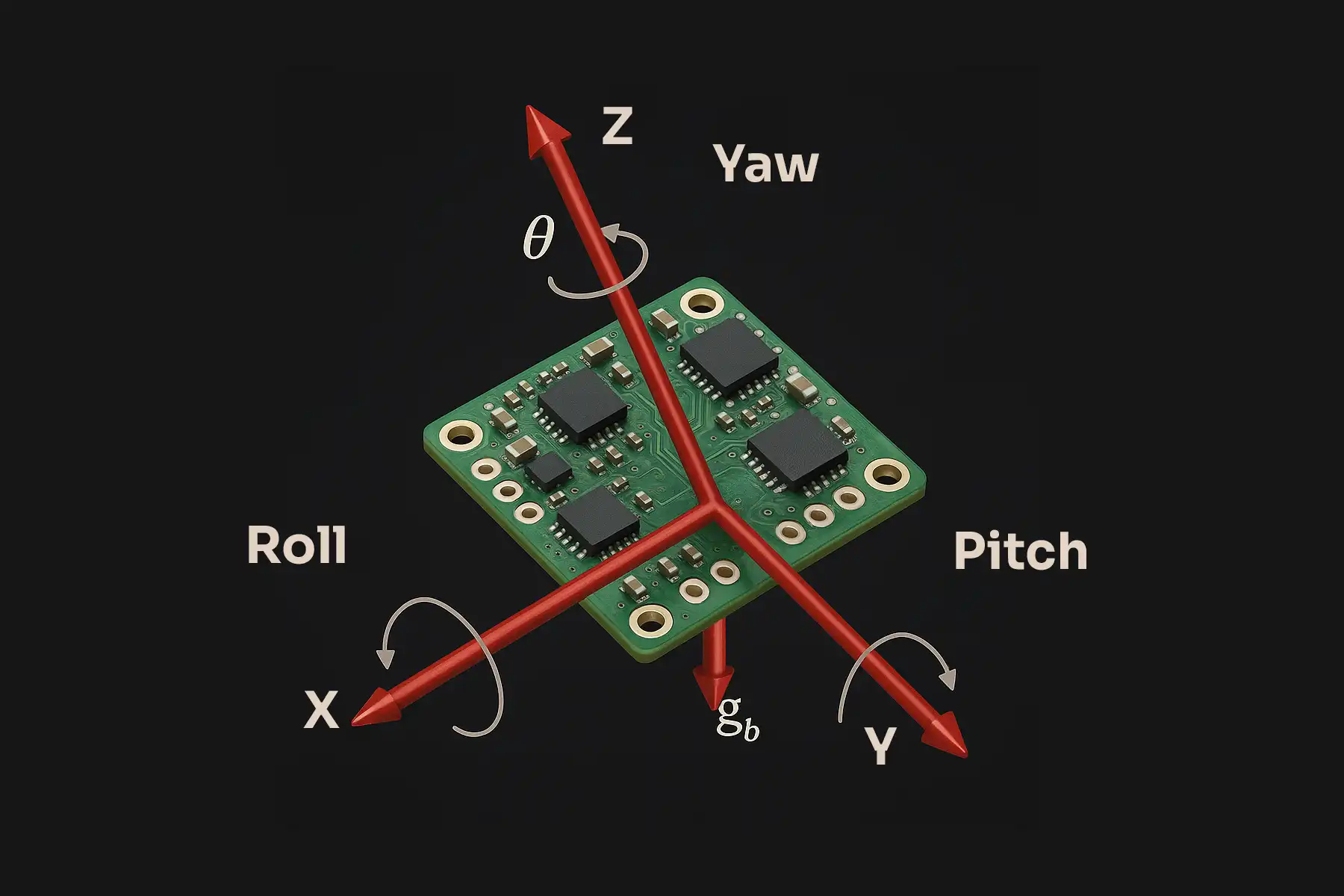
- Measures acceleration and angular velocity along three axes for real-time position updates.
Basic description
The Attitude and heading reference system (AHRS) determines position, orientation, and velocity in GPS-denied environments, ensuring redundancy for both manned and unmanned systems. It operates as a stand-alone inertial unit for medium to large drones or as an integrated component of the Electronic Standby Instrument System (ESIS), enhancing navigation reliability in critical applications.
The system processes data from gyroscopes, accelerometers, a distance-traveled sensor, and a GNSS receiver. Utilizing an Inertial Measurement Unit (IMU) with a 3-axis magnetometer and an air data system, it continuously updates position and orientation through advanced Kalman filtering. Additionally, its GPS antenna supports multi-system GNSS, delivering precise inertial navigation and accurate flight data.
LPP also converts used technology for Inertial Navigation Unit for armoured vehicles and UGVs.
Technical description
| Attitude Rate Measuring Range | Min. ±200°/s |
| Linear Acceleration in Z Axis | -4 to +8 g |
| Gyro Bias Stability | Better than 3 deg/h, Dynamic Range 500 deg/s |
| Measuring Linear Acceleration | 40 g |
| Attitude Data Stability | Up to 0.1 deg/h |
Headquarters
- LPP s.r.o.
- Pod Hajkem 406/1a, 180 00 Prague
- Czech Republic
Production facility
- LPP s.r.o.
- Delnicka 475, 530 03 Pardubice
- Czech Republic
Documents
Headquarters
- LPP s.r.o.
- Pod Hajkem 406/1a, 180 00 Prague
- Czech Republic
Production facility
- LPP s.r.o.
- Delnicka 475, 530 03 Pardubice
- Czech Republic