Visual navigation
- Visual Navigation System ensures precise MTS Unmanned Aerial Vehicle (UAV) localisation in GPS-denied and jammed environments.
- Operates autonomously without external signals, making the MTS drone resistant to electronic warfare.
- Integrates flight data, visual odometry, and map matching for drift correction.
- Uses a Kalman filter to process sensor data, determining position without GNSS reliance.
- Provides full autonomy, accurate mission execution, and seamless compatibility with UAV systems.
Basic description
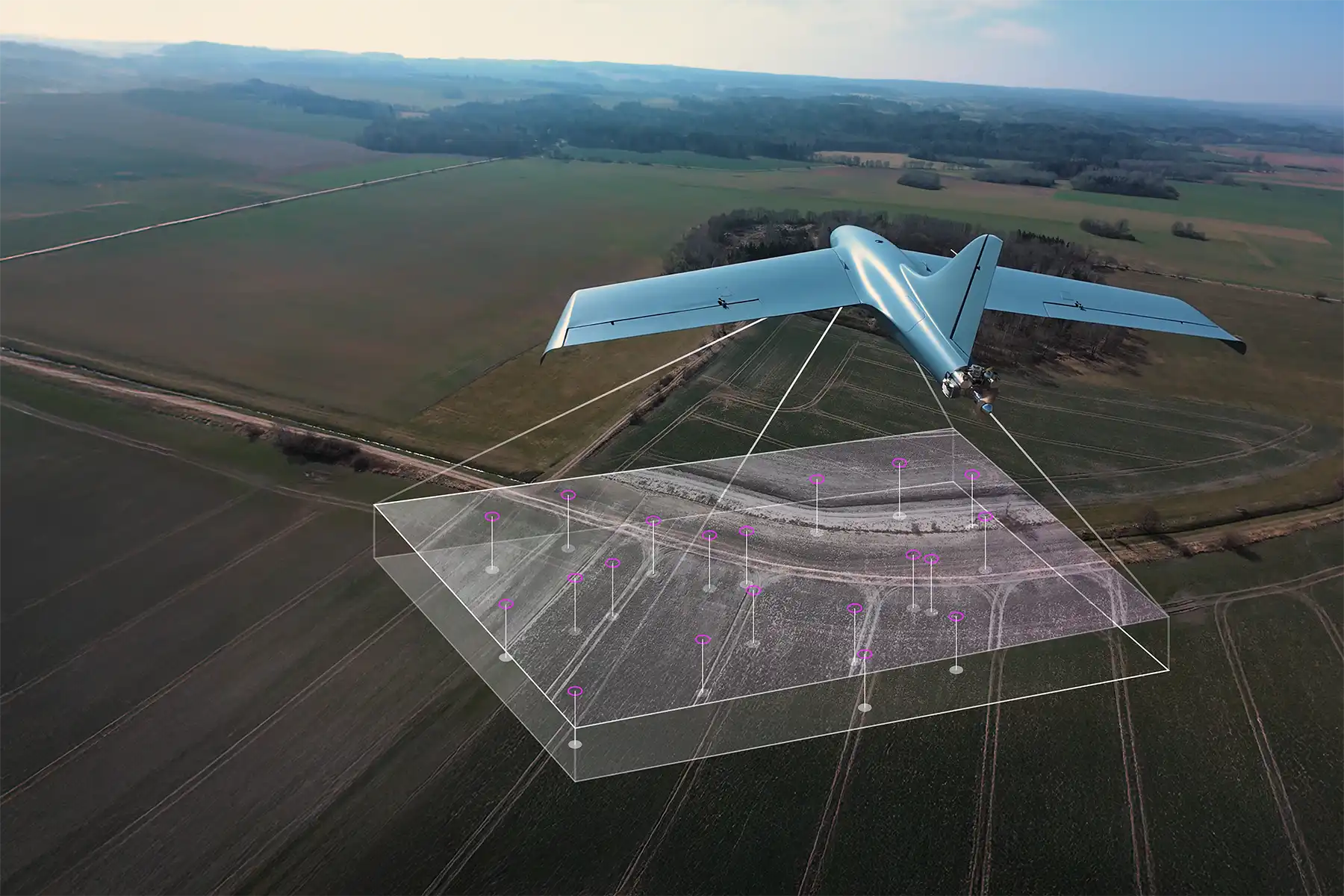
The Visual Navigation System enables MTS Unmanned Aerial Vehicle positioning in GNSS-denied and jammed environments, ensuring reliable navigation despite electronic warfare. By integrating multiple sensor inputs, the system provides fully autonomous navigation without relying on external signals, making it a critical solution for mission continuity in contested areas.
The system combines barometric data, optical flow computer vision for visual odometry and map-matching algorithms to correct positional drift. Data from these sources is processed using a Kalman filter and transmitted to the LPP autopilot for autonomous drone navigation. The Visual Navigation ensures jamming-proof operations, enabling accurate localization without GPS and maintaining uninterrupted UAV functionality in challenging environments.
LPP has mastered Optical Tracking and, combined with Visual Navigation, enables the MTS drone to not only autonomously reach its destination, but also recognize the target, and execute the mission’s final phase.
Technical description
Headquarters
- LPP s.r.o.
- Pod Hajkem 406/1a, 180 00 Prague
- Czech Republic
Production facility
- LPP s.r.o.
- Delnicka 475, 530 03 Pardubice
- Czech Republic
Documents
Headquarters
- LPP s.r.o.
- Pod Hajkem 406/1a, 180 00 Prague
- Czech Republic
Production facility
- LPP s.r.o.
- Delnicka 475, 530 03 Pardubice
- Czech Republic